Over on GitHub, David Yu has an interesting performance benchmark for function calls of various Foreign Function Interfaces (FFI):
https://github.com/dyu/ffi-overhead
He created a shared object (.so) file containing a single, simple C
function. Then for each FFI he wrote a bit of code to call this function
many times, measuring how long it took.
For the C “FFI” he used standard dynamic linking, not dlopen(). This
distinction is important, since it really makes a difference in the
benchmark. There’s a potential argument about whether or not this is a
fair comparison to an actual FFI, but, regardless, it’s still
interesting to measure.
The most surprising result of the benchmark is that LuaJIT’s FFI is substantially faster than C. It’s about 25% faster than a native C function call to a shared object function. How could a weakly and dynamically typed scripting language come out ahead on a benchmark? Is this accurate?
It’s actually quite reasonable. The benchmark was run on Linux, so the performance penalty we’re seeing comes the Procedure Linkage Table (PLT). I’ve put together a really simple experiment to demonstrate the same effect in plain old C:
https://github.com/skeeto/dynamic-function-benchmark
Here are the results on an Intel i7-6700 (Skylake):
plt: 1.759799 ns/call
ind: 1.257125 ns/call
jit: 1.008108 ns/call
These are three different types of function calls:
- Through the PLT
- An indirect function call (via
dlsym(3)) - A direct function call (via a JIT-compiled function)
As shown, the last one is the fastest. It’s typically not an option for C programs, but it’s natural in the presence of a JIT compiler, including, apparently, LuaJIT.
In my benchmark, the function being called is named empty():
void empty(void) { }
And to compile it into a shared object:
$ cc -shared -fPIC -Os -o empty.so empty.c
Just as in my PRNG shootout, the benchmark calls this function repeatedly as many times as possible before an alarm goes off.
Procedure Linkage Tables
When a program or library calls a function in another shared object, the compiler cannot know where that function will be located in memory. That information isn’t known until run time, after the program and its dependencies are loaded into memory. These are usually at randomized locations — e.g. Address Space Layout Randomization (ASLR).
How is this resolved? Well, there are a couple of options.
One option is to make a note about each such call in the binary’s metadata. The run-time dynamic linker can then patch in the correct address at each call site. How exactly this would work depends on the particular code model used when compiling the binary.
The downside to this approach is slower loading, larger binaries, and less sharing of code pages between different processes. It’s slower loading because every dynamic call site needs to be patched before the program can begin execution. The binary is larger because each of these call sites needs an entry in the relocation table. And the lack of sharing is due to the code pages being modified.
On the other hand, the overhead for dynamic function calls would be eliminated, giving JIT-like performance as seen in the benchmark.
The second option is to route all dynamic calls through a table. The original call site calls into a stub in this table, which jumps to the actual dynamic function. With this approach the code does not need to be patched, meaning it’s trivially shared between processes. Only one place needs to be patched per dynamic function: the entries in the table. Even more, these patches can be performed lazily, on the first function call, making the load time even faster.
On systems using ELF binaries, this table is called the Procedure Linkage Table (PLT). The PLT itself doesn’t actually get patched — it’s mapped read-only along with the rest of the code. Instead the Global Offset Table (GOT) gets patched. The PLT stub fetches the dynamic function address from the GOT and indirectly jumps to that address. To lazily load function addresses, these GOT entries are initialized with an address of a function that locates the target symbol, updates the GOT with that address, and then jumps to that function. Subsequent calls use the lazily discovered address.

The downside of a PLT is extra overhead per dynamic function call, which is what shows up in the benchmark. Since the benchmark only measures function calls, this appears to be pretty significant, but in practice it’s usually drowned out in noise.
Here’s the benchmark:
/* Cleared by an alarm signal. */
volatile sig_atomic_t running;
static long
plt_benchmark(void)
{
long count;
for (count = 0; running; count++)
empty();
return count;
}
Since empty() is in the shared object, that call goes through the PLT.
Indirect dynamic calls
Another way to dynamically call functions is to bypass the PLT and
fetch the target function address within the program, e.g. via
dlsym(3).
void *h = dlopen("path/to/lib.so", RTLD_NOW);
void (*f)(void) = dlsym("f");
f();
Once the function address is obtained, the overhead is smaller than
function calls routed through the PLT. There’s no intermediate stub
function and no GOT access. (Caveat: If the program has a PLT entry for
the given function then dlsym(3) may actually return the address of
the PLT stub.)
However, this is still an indirect function call. On conventional architectures, direct function calls have an immediate relative address. That is, the target of the call is some hard-coded offset from the call site. The CPU can see well ahead of time where the call is going.
An indirect function call has more overhead. First, the address has to be stored somewhere. Even if that somewhere is just a register, it increases register pressure by using up a register. Second, it provokes the CPU’s branch predictor since the call target isn’t static, making for extra bookkeeping in the CPU. In the worst case the function call may even cause a pipeline stall.
Here’s the benchmark:
volatile sig_atomic_t running;
static long
indirect_benchmark(void (*f)(void))
{
long count;
for (count = 0; running; count++)
f();
return count;
}
The function passed to this benchmark is fetched with dlsym(3) so the
compiler can’t do something tricky like convert that indirect
call back into a direct call.
If the body of the loop was complicated enough that there was register pressure, thereby requiring the address to be spilled onto the stack, this benchmark might not fare as well against the PLT benchmark.
Direct function calls
The first two types of dynamic function calls are simple and easy to use. Direct calls to dynamic functions is trickier business since it requires modifying code at run time. In my benchmark I put together a little JIT compiler to generate the direct call.
There’s a gotcha to this: on x86-64 direct jumps are limited to a 2GB
range due to a signed 32-bit immediate. This means the JIT code has to
be placed virtually nearby the target function, empty(). If the JIT
code needed to call two different dynamic functions separated by more
than 2GB, then it’s not possible for both to be direct.
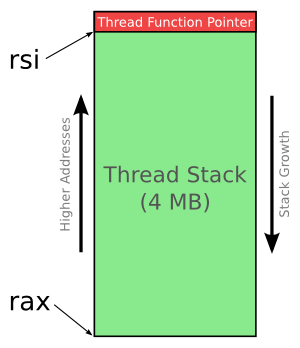
To keep things simple, my benchmark isn’t precise or very careful
about picking the JIT code address. After being given the target
function address, it blindly subtracts 4MB, rounds down to the nearest
page, allocates some memory, and writes code into it. To do this
correctly would mean inspecting the program’s own memory mappings to
find space, and there’s no clean, portable way to do this. On Linux
this requires parsing virtual files under /proc.
Here’s what my JIT’s memory allocation looks like. It assumes
reasonable behavior for uintptr_t casts:
static void
jit_compile(struct jit_func *f, void (*empty)(void))
{
uintptr_t addr = (uintptr_t)empty;
void *desired = (void *)((addr - SAFETY_MARGIN) & PAGEMASK);
/* ... */
unsigned char *p = mmap(desired, len, prot, flags, fd, 0);
/* ... */
}
It allocates two pages, one writable and the other containing
non-writable code. Similar to my closure library, the lower
page is writable and holds the running variable that gets cleared by
the alarm. It needed to be nearby the JIT code in order to be an
efficient RIP-relative access, just like the other two benchmark
functions. The upper page contains this assembly:
jit_benchmark:
push rbx
xor ebx, ebx
.loop: mov eax, [rel running]
test eax, eax
je .done
call empty
inc ebx
jmp .loop
.done: mov eax, ebx
pop rbx
ret
The call empty is the only instruction that is dynamically generated
— necessary to fill out the relative address appropriately (the minus
5 is because it’s relative to the end of the instruction):
// call empty
uintptr_t rel = (uintptr_t)empty - (uintptr_t)p - 5;
*p++ = 0xe8;
*p++ = rel >> 0;
*p++ = rel >> 8;
*p++ = rel >> 16;
*p++ = rel >> 24;
If empty() wasn’t in a shared object and instead located in the same
binary, this is essentially the direct call that the compiler would have
generated for plt_benchmark(), assuming somehow it didn’t inline
empty().
Ironically, calling the JIT-compiled code requires an indirect call (e.g. via a function pointer), and there’s no way around this. What are you going to do, JIT compile another function that makes the direct call? Fortunately this doesn’t matter since the part being measured in the loop is only a direct call.
It’s no mystery
Given these results, it’s really no mystery that LuaJIT can generate more efficient dynamic function calls than a PLT, even if they still end up being indirect calls. In my benchmark, the non-PLT indirect calls were 28% faster than the PLT, and the direct calls 43% faster than the PLT. That’s a small edge that JIT-enabled programs have over plain old native programs, though it comes at the cost of absolutely no code sharing between processes.
]]>