nullprogram.com/blog/2017/04/27/
Update 2020: A DOS build of Connect Four was featured on GET OFF MY
LAWN.
Monte Carlo tree search (MCTS) is the most impressive game
artificial intelligence I’ve ever used. At its core it simulates a
large number of games (playouts), starting from the current game
state, using random moves for each player. Then it simply picks the
move where it won most often. This description is sufficient to spot
one of its most valuable features: MCTS requires no knowledge of
strategy or effective play. The game’s rules — enough to simulate
the game — are all that’s needed to allow the AI to make decent moves.
Expert knowledge still makes for a stronger AI, but, more many games,
it’s unnecessary to construct a decent opponent.
A second valuable feature is that it’s easy to parallelize. Unlike
alpha-beta pruning, which doesn’t mix well with parallel
searches of a Minimax tree, Monte Carlo simulations are practically
independent and can be run in parallel.
Finally, the third valuable feature is that the search can be stopped
at any time. The completion of any single simulation is as good a
stopping point as any. It could be due to a time limit, a memory
limit, or both. In general, the algorithm converges to a best move
rather than suddenly discovering it. The good moves are identified
quickly, and further simulations work to choose among them. More
simulations make for better moves, with exponentially diminishing
returns. Contrasted with Minimax, stopping early has the risk that the
good moves were never explored at all.
To try out MCTS myself, I wrote two games employing it:
They’re both written in C, for both unix-like and Windows, and should
be easy to build. I challenge you to beat them both. The
Yavalath AI is easier to beat due to having blind spots, which I’ll
discuss below. The Connect Four AI is more difficult and will likely
take a number of tries.
Connect Four
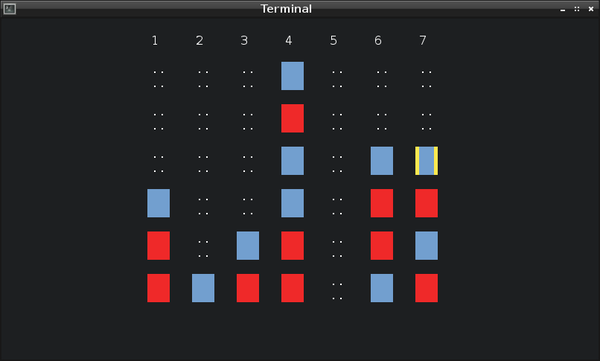
MCTS works very well with Connect Four, and only requires modest
resources: 32MB of memory to store the results of random playouts, and
500,000 game simulations. With a few tweaks, it can even be run in
DOSBox. It stops when it hits either of those limits. In theory,
increasing both would make for stronger moves, but in practice I can’t
detect any difference. It’s like computing pi with Monte Carlo,
where eventually it just runs out of precision to make any more
progress.
Based on my simplified description above, you might wonder why it needs
all that memory. Not only does MCTS need to track its win/loss ratio for
each available move from the current state, it tracks the win/loss ratio
for moves in the states behind those moves. A large chunk of the game
tree is kept in memory to track all of the playout results. This is why
MCTS needs a lot more memory than Minimax, which can discard branches
that have been searched.

A convenient property of this tree is that the branch taken in the
actual game can be re-used in a future search. The root of the tree
becomes the node representing the taken game state, which has already
seen a number of playouts. Even better, MCTS is weighted towards
exploring good moves over bad moves, and good moves are more likely to
be taken in the real game. In general, a significant portion of the tree
gets to be reused in a future search.
I’m going to skip most of the details of the algorithm itself and focus
on my implementation. Other articles do a better job at detailing the
algorithm than I could.
My Connect Four engine doesn’t use dynamic allocation for this tree (or
at all). Instead it manages a static buffer — an array of tree nodes,
each representing a game state. All nodes are initially chained together
into a linked list of free nodes. As the tree is built, nodes are pulled
off the free list and linked together into a tree. When the game
advances to the next state, nodes on unreachable branches are added back
to the free list.
If at any point the free list is empty when a new node is needed, the
current search aborts. This is the out-of-memory condition, and no more
searching can be performed.
/* Connect Four is normally a 7 by 6 grid. */
#define CONNECT4_WIDTH 7
#define CONNECT4_HEIGHT 6
struct connect4_node {
uint32_t next[CONNECT4_WIDTH]; // "pointer" to next node
uint32_t playouts[CONNECT4_WIDTH]; // number of playouts
float score[CONNECT4_WIDTH]; // pseudo win/loss ratio
};
Rather than native C pointers, the structure uses 32-bit indexes into
the master array. This saves a lot of memory on 64-bit systems, and the
structure is the same size no matter the pointer size of the host. The
next field points to the next state for the nth move. Since 0 is a
valid index, -1 represents null (CONNECT4_NULL).
Each column is a potential move, so there are CONNECT4_WIDTH
possible moves at any given state. Each move has a floating point
score and a total number of playouts through that move. In my
implementation, the search can also halt due to an overflow in a
playout counter. The search can no longer be tracked in this
representation, so it has to stop. This generally only happens when
the game is nearly over and it’s grinding away on a small number of
possibilities.
Note that the actual game state (piece positions) is not tracked in the
node structure. That’s because it’s implicit. We know the state of the
game at the root, and simulating the moves while descending the tree
will keep track of the board state at the current node. That’s more
memory savings.
The state itself is a pair of bitboards, one for each player. Each
position on the grid gets a bit on each bitboard. The bitboard is very
fast to manipulate, and win states are checked with just a handful of
bit operations. My intention was to make playouts as fast as possible.
struct connect4_ai {
uint64_t state[2]; // game state at root (bitboard)
uint64_t rng[2]; // random number generator state
uint32_t nodes_available; // total number of nodes available
uint32_t nodes_allocated; // number of nodes in the tree
uint32_t root; // "pointer" to root node
uint32_t free; // "pointer" to free list
int turn; // whose turn (0 or 1) at the root?
};
The nodes_available and nodes_allocated are not necessary for
correctness nor speed. They’re useful for diagnostics and debugging.
All the functions that operate on these two structures are
straightforward, except for connect4_playout, a recursive function
which implements the bulk of MCTS. Depending on the state of the node
it’s at, it does one of two things:
-
If there are unexplored moves (playouts == 0), it randomly chooses
an unplayed move, allocates exactly one node for the state behind that
move, and simulates the rest of the game in a loop, without recursion
or allocating any more nodes.
-
If all moves have been explored at least once, it uses an upper
confidence bound (UCB1) to randomly choose a move, weighed towards
both moves that are under-explored and moves which are strongest.
Striking that balance is one of the challenges. It recurses into that
next state, then updates the node with the result as it propagates
back to the root.
That’s pretty much all there is to it.
Yavalath
Yavalath is a board game invented by a computer
program. It’s a pretty fascinating story. The depth and strategy
are disproportionately deep relative to its dead simple rules: Get four
in a row without first getting three in a row. The game revolves around
forced moves.
The engine is structured almost identically to the Connect Four engine.
It uses 32-bit indexes instead of pointers. The game state is a pair of
bitboards, with end-game masks computed at compile time via
metaprogramming. The AI allocates the tree from a single, massive
buffer — multiple GBs in this case, dynamically scaled to the available
physical memory. And the core MCTS function is nearly identical.
One important difference is that identical game states — states where
the pieces on the board are the same, but the node was reached through
a different series of moves — are coalesced into a single state in the
tree. This state deduplication is done through a hash table. This
saves on memory and allows multiple different paths through the game
tree to share playouts. It comes at a cost of including the game state
in the node (so it can be identified in the hash table) and reference
counting the nodes (since they might have more than one parent).
Unfortunately the AI has blind spots, and once you learn to spot them it
becomes easy to beat consistently. It can’t spot certain kinds of forced
moves, so it always falls for the same tricks. The official Yavalath
AI is slightly stronger than mine, but has a similar blindness. I think
MCTS just isn’t quite a good fit for Yavalath.
The AI’s blindness is caused by shallow traps, a common problem
for MCTS. It’s what makes MCTS a poor fit for Chess. A shallow trap is
a branch in the game tree where the game will abruptly end in a small
number of turns. If the random tree search doesn’t luckily stumble
upon a trap during its random traversal, it can’t take it into account
in its final decision. A skilled player will lead the game towards one
of these traps, and the AI will blunder along, not realizing what’s
happened until its too late.
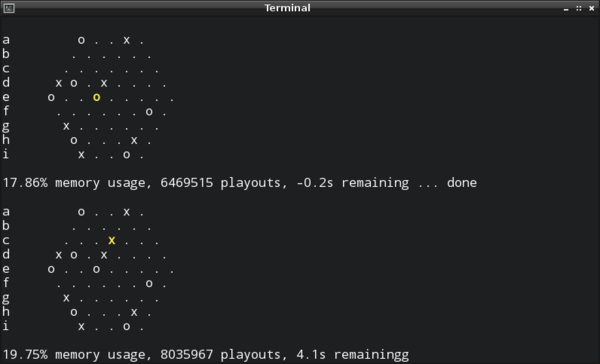
I almost feel bad for it when this happens. If you watch the memory
usage and number of playouts, once it falls into a trap, you’ll see it
using almost no memory while performing a ton of playouts. It’s
desperately, frantically searching for a way out of the trap. But it’s
too late, little AI.
I’m really happy to have sunk a couple weekends into playing with MCTS.
It’s not always a great fit, as seen with Yavalath, but it’s a really
neat algorithm. Now that I’ve wrapped my head around it, I’ll be ready
to use it should I run into an appropriate problem in the future.